Radio RX:
http://www.banggood.com/de/FrSky-XSR-2_4GHz-16CH-ACCST-Receiver-S-Bus-CPPM-Output-Support-X9D-X9E-X9DP-X12S-X-Series-p-1031481.html
Attention: EU-LBT Firmware - had to flash the receivers FW to nonEU
this video was helpful with the cabling: https://www.youtube.com/watch?v=sHHmNhYlGJs&t=428s
Once the binding suceeded (Taranis - XSR with D16 C1-16 mode)
I just turned on my FPV monitor and instantly saw the TX wizard on the vortex. This is what I already loved on the Vortex250!
Setting up the sticks was so easy - no need for a PC with cleanflight config software.
OSD looks quite similar to the Vortex250
VTX Power:
1-600mw? ce version is locked to 25mw (rumors say you can unlock it?)
Low 25 200 350 max
Battery: 850mah 4cell
Flighttimes: around 3-5mins (depending on throttle and battery of course)
Connectors: the mini Vortex uses XT30 connectors! (I resoldered a XT60 on so I could use the batteries connectors without resoldering all of them).
Props:
no bullnose, HQ 3x3x3, racekraft 3x3x3, or not as good the gemfan 3x3.5x3
all those in 4 blade should work also
Finally I have a working flyingwing for FPV in 2017! Multicopters kept me so busy and were so convenient last year that I didnt enjoy the pure joy of fixedwing aviation. Really looking forward to do so soon!
BUILD TIPS:
- gluing
use sandpaper to roughen the surfaces and then use UHU Por, or gorilla glue
- glue the servo hinges!
- cut own servowire channel to use orig servo wires
- use threadlock glue on motor screws
Package Includes:
2 x Wings
1 x Fuselage
2 x Small Wing Tips
1 x Nose Block
1 x Main Hatch Cover
2 x Emax ES08A Servos
1 x 3-Axis Flight Control
1 x Flight Control Circuit Board Base
1 x Sunnysky2205 Motor 2300KV
4 x 6045 Propellers (2ccw, 2cw :) )
1 x 700TVL Camera
1 x 200mW AV Transmitter
1 x 20A ESC
1 x Stickersheet
1 x User Manual (4 pages)
I bought this drone, didnt get it from DJI but ordered it via Globe-Flight.de. This is my trusted shop (I ordered my firest FPV set back in 2008 at this shop).
I have a lot of drones - the Mavic makes most of them obsolete now :(
I started with the tricopter in 2011, got the TBS discovery with DJI naza in 2012 (which was my first GPS position hold, return home platform back then!). Later got into AP ships with brushless gimbals (DJI Phantom2, Black Snapper, Xugong). I still fly the Phantom 2 from time to time - but a 2axis gimbal just doesnt look good anymore :) Tried the Inspire1 and the Phantom4 when I had the chance to - but after the first playing around with it I didnt actually buy one (cause I had so many similar drones already).
Now since I skipped P3 and P4 I thought it was time to get this really tiny, backpack friendly, worry free drone. It's ready for flying in 2-3mins and has so many functions built in - a few years ago you would have needed a whole trunk full of expensive FPV gear to yield the same results (if possible at all).
What I love about this one:
- very easy to handle
- small, compact, well thought out
- super cam quality (best in this size cat) you can print stills to large format and even can take RAW pics!
- great range / video transmission
you just have a smooth 720p image, without intereference, without the permanent fear of flying blind suddenly
you can switch to 1080p live video - but then the recorded video is also 1080p
I even flew it from inside my car to a nice distance (more then enough) without even loosing signal or stuttering video!
- flighttimes - 20mins for sure - which is really more than you need normally!
- very well designed remote controller
- bright display (ok this is rather depending on your phone - I have the Galaxy S7 which is very bright)
- DJI Go app: great functions!
highlight: it records downlink video in great quality directly on your phone as well (ok that's not new with the mavic).
also records all flight data in a log file! so you can even replay the GPS data and see how you flew, where, what happend, how you moved the sticks... really great log functions (cool for a statistics nerd like me).
- easy to catch with the hand (carefully though!) - landing in grass or dust is not optimal. Having to use a landing pad would also kill some of the ultra portability...
- silent, doesnt draw a lot of attention on you
some problems I found:
- DISCONNECT problem
this is maybe the biggest issue I had, but maybe they already fixed it (not happend again yet):
what happend? on a flight, the app went into black/white and said it's disconnected. Restarting the app didnt help. While this happend my Mavic was far away, I was blind. But I could use the remote still. So I pressed the RTH button and luckily it came back reliable!
things I do now to prevent this:
I close all apps on the phone before using DJI Go app,
have it in airplane mode,
SAMSUNG S7: I turn OFF the "quickcharge with cable" function in powersettings - one theory of mine: the phone sucks to much power out of the remote while charging and the remote cuts the connection
try to run it with as much phone battery as possible
also got 2 DJI go app updates since then, and on 7.Nov. they published a new mavic firmware - INSTALL this asap!
- sometimes cam/gimbal does shake (on sudden change of flight direction - so go smooth!)
regarding go smooth: there are some guidlines out yet, how to finetune the YAW endpoints, YAW expo and also smoothing out the gimbal movements - this all helps to get much smoother shots. Best yet I find it to just fly straight "like on rails or a cable cam" and let this impress your viewers - stunningly smooth and crips clear 4k footage!
- gimbal looks very fragile! It hangs on weak rubber (for vibration dampening) and if not protected with the plastic part for locking the gimbal - the cam shakes a lot - so DONT transport it without this plastic protection!
- obstacle avoidance can get irritated by sunlight or fog as well - if this happens - SWITCH to sport mode and be able to come home thru these invisible obstacles that your drone wants to avoid :)
- in higher winds normal GPS mode is to slow - also switch to Sport mode to fight the headwinds!
NEVER fly too far away with tailwind - you might underestimate the distance and power needed to come back against a strong wind. This might lead to an unplanned landing far away from you (in worst case you're flying home over the water against wind!)
- GPS / compass error if you want to start from the roof of your car
- DJI Go app: IOS has better language support (german available), Android version has NO german language...
you can get LITCHI which is also available in german (other languages?)
- 1080p60 seems to look aweful (aliasing, steps)
Advice "fly more!":
I bought the "fly more" package - you should too!
When you buy the normal package - you will end up ordering a 2nd maybe 3rd battery soon after (because only one batt is never good).
If you buy 2 batteries seperatly - this is almost the same price than the "fly more" pack!
(and this pack includes also: the car charger, the 4x serial charging hub, the nice carrying case, powerbank adapter, props).
Of course you also should do enough training flights with the drone on safe grounds (large field) before you start taking it with you and fly anywhere.
Since I get asked a lot how to enter the FPV hobby I compiled this list of things to start at. Not the best components - but something you can use for a long time with good value/price rating. Most of the things I use myself (excep the 250 copter here).
FPV entry is really easy today - so many RTF systems, plug & fly versions... You got to consider some things and most of us have to watch their budget.
For small budgets - 250 class Miniquads are good to start with. As they are often aimed for the races they are quite crash-resistant! There are many 250 sets - recently I tested the ambitious "XJaguar" from Fylpro, my alltime favourite this year is still the ImmersionRC Vortex250. Durable, lots of features and I had many flights with it this year! Also checke out this free FPV sim to get started: Drone Racing League SIM
Batteries:
1500mah 3cell with high C-rating!
I would use the hobbyking EU warehouse (or whatever is next to you) to have shorter delivery times and less customs problems.
(if you bought the diversity RX above - also get one directional antenna ImmersionRC Spiro Patch )
or better yet, check out the Circular-Wireless Helicals!
Goggles:
This could be the most expensive part here (if you go for the Sony Cinemizers or the Dominator HD for example - 500-700€)
But you can get away cheap and with a great image if you get the styrofoam box type goggles like the:
Quanum V2and batterycable for it (make sure to get a 3cell battery for goggles and RX also!)
Recently they brought out the Fatshark Dominator SEwhich I think is the best value/money option - check my short video review.
Radio - control link:
FrSky Taranis - a good remote which is very affordable!
Receivers are good range and cheap here (around 30€). Standard receiver for me is the X8r (with telemetry and around 1-2km range). If you really wanna go far, check the LR receivers.
Hope I didnt forget something really important here - please comment if so. Also comment your suggestions if you have something WAY better for a newbie to be included in this list. But it's not the "top notch" list, it's aimed for entry into the hobby.
I think this topic is hot, and if I get a lot of response I might try to cover this in a video also.
This is a great racing drone kit! The components are pretty decent, well thought out (like the powercube style electronics, CCD Cam usage), the quad is durable (although I didnt crash it yet) but lightweight.
Build is simple but there are some setup tips (in cleanflight and in the OSD) which you should read here to have an easier build.
OSD: you can even change PIDs in the OSD with your remote (like I know it from my Vortex).
The VTX power of course is not 25-600mw as advertised - rather 20-300mw - but that's fine. Switching the power can kill the VTX which is about the only problem I found here. Ok - you will see that the video downlink has a vibration issue (maybe loose board in the Runcam Swift?).
Find all the Specs here
And buy it for around 250$ in most of the chinese RC stores. They suggested I should get an affilate link, but I think this could affect my reviews in a way I dont like.
Video Index:
00:46 Unbocing
03:47 Buildtips
05:30 Soldering ESCs
06:42 motor direction
07:46 important cleanflight tips
07:58 VTX Settings (channel...)
08:57 VTX Power switching (25-300mw)
11:25 Maidenflight
11:58 Maidenflight #2 :)
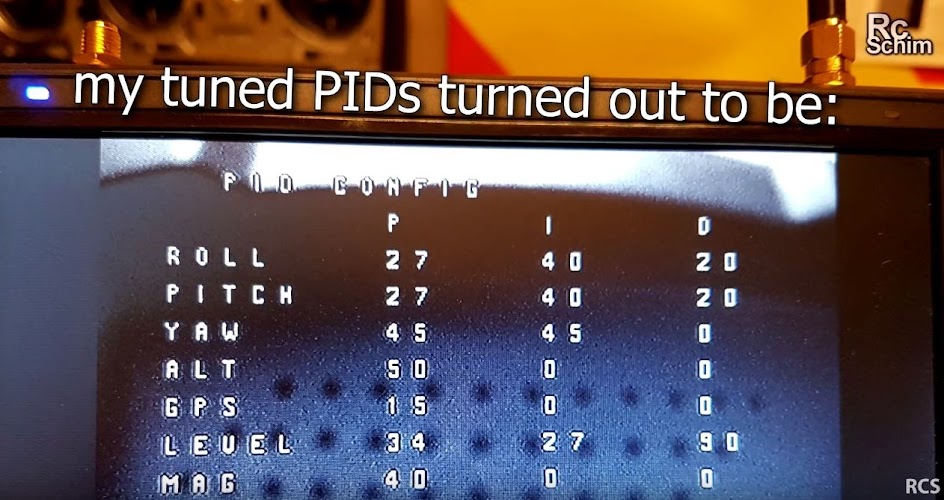
12:28 my tuned PIDs
13:14 Speedtests and FPV footage on the field
15:09 --- A LOT OF SCREAMING HERE ---
ESCs set motordirection in blheli suite?
- there is a drawing in the RCGthread but you can also use blheli suite to correct directions in software
PIDs should be preset in factory no they werent. PIDS see video.
X4r SBus Connection
use the UART3 and turn on radio switch in Cleanflight / Ports tab, use Serial / Sbus setting in Receivers Tab
►OSD (I think it's a MinimOSD integrated in their VTX board):
THR=mid + YAW=right + Pitch/Nick=full = go into OSD menu
if this doesnt work, your OSD board doesnt have a connection to FC board (was the case for me). you might also have "no data" in OSD.
Solution: in Cleanflight Config / PORTS Tab: set UART2 Data/MSP to on!
To switch VTX Power:
hold vtx ch button
power on the quad (then the band LED will blink slow for LOW mode and fast for HIGH mode).
Danger! Do not switch to often, use the smallest possible battery.
I explain lipo battery charging in general in this video. Turnigy Graphene 1300/1800mah 4cell http://bit.ly/2d7tgVU (make sure to order them from a nearby warehouse!)
Turnigy Nanotech a-Spec 1300mah 4cell (maybe not so good?)
(cant find them anymore, but the "normal" nanotechs should be good as well: http://bit.ly/2cqHYog)
GRAHPENE?
=========
Difference between Graphene and Nanotech? Graphenes are a bit heavier, hold up to high power drain better, keep their discharge voltage up until the end, are said to be durable and have a longer lifespan (to be proven over time).
That being said I have a few Nanotechs with high c-rating and they work quite well also!
LIPO and CHARGING tips:
=======================
if a battery has higher C-rating it will be a bit heavier.
if you fly and the battery is very hot afterwards - you're demainding too much - battery wont life long
puffed batteries are worn out, wont have full capacity anymore
charge batteries with 1c (means with their capacity in amps - 1300mah batt - charge with 1300ma - or 1.3amps)
always balance
dont use damaged batteries - they might have an issue and lead to a crash on the next flight
DONT LET YOUR CHARGER UNATTENTED! make sure to always be around, have more chargers to charge more efficiently, USE A SMOKE ALERT in that room, have a fire extinguisher...
How to charge all those miniquad batteries? I use 3 different Dual-Chargers - see their options and features here. Ultrapower UP400AC Duo - buy: http://bit.ly/2cMntmo
Tech specs: http://bit.ly/2cEWM5g
DONT LET YOUR CHARGER UNATTENTED! make sure to always be around, have more chargers to charge more efficiently, USE A SMOKE ALERT in that room, have a fire extinguisher...
Jumpmarks (for the unpatient ones :)
00:12 ==Ultrapower UP400ac
01:11 Overview
02:48 menu and settings
07:37 ==Graupner Ultra Duo 60
08:44 menu and settings
11:38 ==Team Orion Advance Touch
15:16 12volt (source) charging
16:20 CONCLUSION
24.5.2016 - update! see PIDs and settings on the bottom!
Quick Tipps
LED Board button
Press 2sec to change VTX BAND
Press 5sec to enther TX Setup Wizard
Arm Motors: Throttle=0, YAW=right
Disarm: Throttle=0, YAW=left
Enter OSD: Throttle=0, YAW=left (while Motors are disarmed)
(if you cant arm or dont get into the menu: try trimming yaw more to right or left - your stick "servo-way" is not 100% - set rates on your radio to 100% and repeat the TX Wizard!)
►►GPS Support?
Immersion told me, if you use a "supported" GPS ezOSD will use it and show speed and distance. Anyone already tried this? I'll see if I can get more info on this...
►Tech Specs: Size (diagonal): 250mm (275mm option for 6" Props) Frame: 2mm CF, with 15x Aluminium Standoffs Arms: 4mm Flat CF Motors: vSpec 2204-2300kV, 3mm Shaft ESC: 20/22A EzESC, OneShot125, rotorSENSE Flight Controller: STM32F303 based ('F3') OSD : Full Graphic
BlackBox: 2MB Included
Rx Support: Native CPPM, S-Bus, Spektrum, XBus, SumD, SumH
Rx Selection: Fully Automatic
Camera Mount: GoPro 3/4, mount included
USB Port: Through-Hole FlightCam: 650TVL CCD (HS1177) (this is an important change vs the stock cam, see this video for comparison) weight: 671gr (with gopro+ 1300mah 4s)
451gr all except hd cam and batt)
PIDs: (24.05.2016 modified the Protune 12 - ummagawd) I use: all on stock and: 1800mah 4cell Turnigy graphene (heavy!) 3 bladed DYS props 5x4.5x3 Bullnose RollP3.5 I0.052 D38 PitchP4.1 I0.050 D42 YawP6.7 I0.062 D38 (AltP5.0 I0.000 D0 VelP12.0 I0.045 D2 LevelP4.6 I0.050 D113 ) all of this on default RC Rate1.15 RC Expo0.50 Roll Rate0.70 Pitch Rate0.60 Yaw Rate0.65 RC Yaw Expo0.50 TPA0 ThrottleExp0.00 Looptime1000 PID Contr. MWRewrite Airmodeon BL Version1.0.0.3 OSD Ver.10.0.0.26 LED Ver.10.0.0.2 HW Ver.Fusion Gen 2 FC Ver.2.5.3 BTFL API Ver.1.16
If you want good range the RECEIVER is an important factor. Also the used antennas (see last video) and the transmission power (mw) and environmental influences (humidity, trees,...).
I wanted to see how much the receivers influence the way we see the world (when we fly FPV) - and here I compared 3 of them in different priceranges (Quanum, FR632 and ImmersionRC).
To get to the maximum range soon I used extension-cables on the transmitter and receiver side. The cables DO HAVE a significant penalty on radio power! I measured this at home with the ImmersionRC Powermeter. When using a 1m cable on a 25mw transmitter you only get half the mw you would get without the cable.
3m extension cable on the receivers makes it even worse!
This way I got 170m - 250m until the signal was completly gone. Of course while driving the signal would come and go - and this is where the receivers had different behaviour. Some would drop in- and out more frequently - others showed a quite consistant picture.
Hobbyking sent me this nice groundstation for review.
I think it's a good way to get started fast, without having to build something by yourself. If you maybe have an Quanum Autoscan Video RX already this is a great way to upgrade to a diversity system.
If you want to be very mobile (backpack) with your groundstation - than rather go with a small dedicated diversity and goggles - this box is rather heavy and bulky and more suited for the flying field, taken directly out of your trunk ;-)
I like the combination of power distribution and different VOLTs (5 and 12) available - as well as the easy diversity and battery monitoring.
As a sideeffect - you can check your 4cell batteries if you forgot your battery checker. Vor a next upgrade of this groundstation it would be nice to have more balance plugs and maybe some color led bar- that shows the batt capacity nicer.
►Specs:
Provides 5V and 12V output
Diversity summing when using two standard receivers
Holders/attachment points for Quanum FPV receivers
Tablet mounting frame suits small tablets (ipad mini, not iPad Air)
XT-60 battery connector
Ultra loud Lipo low voltage alarm (lipo voltage limit adjustable - monitors each cell)
Reverse polarity protection
Ports available: RSSI, Video-In, Video-Out
Power Output: 5V and 12V
Power Input: 4S Lipoly
Recommended Battery: 4S Lipoly 5200mAh (Multistar 5200 4cell fits in nicely and has some more room)
Dimensions: 200 x 90 x 82mm
Weight of Unit: 466g
Includes:
1 x Power Supply Unit
1 x Tablet mounting frame
2 x Quanum FPV Receiver holders
Leads and cables
Instruction Manual
IF battery stays connected to Balance lead: power consumption of the LiPo meter is 8mA
that is around 500hrs or 3 weeks on a full 4cell 5200mah
so you shouldnt have it connected all the time (and definitly not over the winter season) but it's not a big deal if you forget it over the night...
Since I get asked about FPV antennas often and while I was preparing the FPV receiver comparison video I compared all the different antennas I have (+ the new AOMWays I got sent).
I did collect some very useful information for you guys since a solid videolink is one of the most important things for flying safe and having fun (you can only enjoy FPV flights if you don't always have to fear the loss of your videosignal).
When I have more time and weather is warmer I will do comprehensive comparisions of antenna- and receiver performance - to get the best range.
Get the Quad here: www.Globe-Flight.de This is my first really fast Quadcopter. The Trincopter was quite fast also, but this smaller one here has tilted motors - which makes all the difference! It's just so cool to feel this "urge to fly forward fast" from the quad! Nice option here to change a few screws and have the motorarms straight or angled (3 steps: 0°, 10° or 20°). The build was fairly easy, you have a good ammount of space in the quad. Battery compartment is large enough to hold an 2250 4cell - maybe even larger. But the best performance is achievable with small and extreme Lipos (1300mah Gensace 75C). ESCs: 4x 12A SimonK Maytech (without BEC) Motors: 4x T-Motor MN2206 - 2000KV Props: 6x4.5 ABS Gemfan Carbon reinforced Battery: 1300mah 4cell Gensace 75c (3mins) / 2200mah 4cell Turnigy 45C (6mins) Weight: 720 / 820gr (with either Gensace or Turnigy) (Vendor): 620g (3s1300) - 700g with 4s1300 and Mobius Seperate BEC for powering the Naze32 board Flightcontroller: Naze32 with cleanflight 1.10 and Luxfloat PIDcontroller https://quadcoptersenzo.nl/en/Flightcontrollers/naze32_acro_funfly
PID Tuning: BLHeli FW / ONEShot125 8.12.2015: Updatedthe PIDs below after some testflights with the new setup. Flies quite stable and smooth now! Cleanflight 1.10 Oneshot125 enabled Controller 2-Luxfloat
P
I
D
Rate
Roll
1,1
0,040
30
0,40
Pitch
1,7
0,045
30
0,40
Yaw
5,0
0,150
1
0,30
feature RX_PPM
feature FAILSAFE
feature ONESHOT125
set looptime = 2400
set rc_rate = 110
set rc_expo = 60
set rc_yaw_expo = 0
set thr_mid = 50
set thr_expo = 0
set roll_rate = 40
set pitch_rate = 40
set yaw_rate = 30
set tpa_rate = 53
set tpa_breakpoint = 1500
Issue with Yaw on fast miniquads (not only this here): Reproduceable - on 45° dives from some alt and with some speed, you "feel" that yaw get's unstable and suddenly it snaps 90° (or more?) to the right (most of the times). I tried so many things (mostly PID tuning and trying different PID controllers in Cleanflight 1.9.0) but nothing helped. After I changed to DIFFERENT PROPS! the problem went away. First set of props were normal, plastic Gemfan 5x4 (balanced with sandpaper) and the new ones were also Gemfan 6x4.5 carbon reinforced ones. I think with the weight of around 800gr the quad was too heavy for the small props. UPDATE: my friend Prometreus was also testing this quad and found that moving to BLHeli ESC firmware and using Onshot and Active Damping help to get the quad stable. =>Video tutorial how to flash the Maytech ESCs to BLHeli Links, Tips: Black Bullet Buildlog (GERMAN) from Prometreus Black Bullet RCGroups.com Thread
Frame: Black Snapper XS from Globeflight
Dimensions (folded in): 22 x 13,7 x 2,6 cm (LxWxH)
Dimensions (folded out): 27,3 x 30,0 x 2,6 cm (LxWxH)
Frame weight (empty): 125g
Weight including electronics and without battery: approx. 320g
Motor axis diagonal: 360 mm (left to right front motor: 250mm) Motors: Eyefly 1806 (2300kv) running on 3cell 1500mah turnigy 35-70c packs. ESCs: Emax - 12A - Nano ESC Oneshot125 and Active braking (Artikelnr. 24-005)
(no BEC!)
Seperate BEC for powering the Naze32 board: BEC UBEC 3A E-Max - EMX-SC-0509
Props: 5x4 Gemfans System weight: 381gr (all except FPV gear, Battery and HDCam) around 600gr (including 150gr battery and 50gr RuncamHD) Flighttimes: around 5mins with 1500mah 3cell and average fast flying
Flightcontroller: Naze32 with cleanflight 1.10 and Luxfloat PIDcontroller https://quadcoptersenzo.nl/en/Flightcontrollers/naze32_acro_funfly Naze32 Settings: Cleanflight V 1.10 / Pid Controller: 2 - Luxfloat
General settings: oneshot125 and "active damping" (this is something that has to be enabled in the ESCs firmware) PID
Roll 1,60,04 30
Pitch 1,80,04 30
YAW 2,50,1 15
Roll and pitchrate0,40 / Yawrate 0,50
TPA0,30 TPA Bpoint1500
Receiver: all default but RCRate 1,10
But as always if you find PID settings on the internet: they dont apply to every quad. You have to have a really similar setup than I do. Every quad is usually different. Many variables influence the outcome. But this can be a good startingpoint for you if you have simlar motors and ESCs...
-
I used a nice PDB (power distribution board) which has 2 switches for LED or VTX
So I can choose if I want my LEDs to be powered on with this easy switch.
I guess you can also hook up LEDs to be controlled by the NAZE32 board as well - but this is more advanced - the PDB is really easy.
FPV Cam: ATTENTION
You need a really small FPV cam for it to fit between the front booms!
I use the Fatshark 600TVL which as a really small housing. I even had to file it down on the side a bit for a good fit.You can tilt it a bit by using more double sided tape on the top of the cam holding frame than on the bottom. Works ok for me.
HD Cam:
initially made to mount the Mobius/runcamHD type of flat cams - but gopro or SJ5000+ in my case works also. Vibration dampening works really well - even wih unbalanced motors / Props I have no jello issues!
Immersion sent me their ezAntennatracker V2 some time ago. First I was sceptic if I want to use it, since tracker setup sounded way to complicated for me when I saw it in use by other FPVers.
But since they have "ez" (for easy) in many of their products I thought I'll give it a try. I opted to use only the PAN-Servo - TILT is only needed if you fly really high or if you have a very directional antenna. I use the 13dbi Spironet with 35° horiz and vertical beamwidth - so I dont need to TILT with the tracker.
This makes the mechanics way easier - just a big "plate" directly on the huge sailwinch servo where I placed the antenna. To get this on my tripod I just taped all together (doublesided tape) - the ezTracker with DiversityRX and servo. Of course the diversity here is overkill - if using a tracker you shouldnt need a diversityRX.
Summary:
If you have a copter or plane with ezOSD onboard - this tracker is really nice and easy to use. It gives you 360° of really good video signal quality! The fact that you have to have telemetry however is a showstopper for me on many FPV vehicles (I have many quads and planes and only few of them have telemetry).
For me: I packed the diversity and the tracker on one groundstation and I can switch between: tracker operation - or just diversity. Recently I made this quite modular with some gopro mounts (i can plug in antenna and monitor additionally if I want to).
In a next video I will try to compare the use of a tracker to my normal use of diversity RX with different antennas - most noteably the new Pepperbox high gain, high beamwidth antenna!
►Startup (5mins!):
- set home (FPV vehicle with enough SAT acquired and with ezOSD telemetry running! standing next to the groundstation
- BEARING Calibration:
I found this to be the easiest way. You just move the copter away in one direction (20 or 30ft) and make sure the antenna is pointing in the right direction - if not - adjust.
►Requirements to get this tracker running:
Quite simple - you just need their ezOSD (or maybe some other compatible telemetry downlink?). the OSD sends GPS position and other telemetry info encoded in the audiochannel of your normal FPV downlink (one audio channel).
If you want to get a better understanding of how the video downlink or radio uplink to your FPV model works - you need such an measurment device. It's nice to read a lot about the theories but I need some proof. Here you can see what's going on.
Flighttime (in hover with gimbal and cam):
~15mins (used 1462mah for 4:39 flight and calculated the estimate flighttime for save 80% battery usage)
Pricetag:
1100€ (RTF with Copter+Charger+Gimbal+Radio+Battery)
+ 250€ for FPV Set (TFT+RX and TX)
Battery-Bay (Plastic housing):
3,5cm height
8,4cm width
housing is around 16cm deep (but you need to get cables in there...)
orig. battery without housing:
13,5cm x 7,2cm x 3,2cm 6S 6000mah 8c dicharge (48amps) 1c charge
Morpheus Gimbal: for GP3 and GP3+ (not GP4?)
Weight: 280g, 2s-4s voltage
Tilt: 90° Roll: 45° Pan: 360°
Flight controller Gains:
without gimbal: (set per default)
Roll: 55
Pitch: 55
Sway: 95 (Yaw)
WITH gimbal (a bit heavier)
Roll: 45
Pitch: 45
Sway : 80 (Yaw)
FPV Set:
7" TFT monitor with sunshade and good brightness!
Internal battery, chargeable via USB plug.
8ch: 5733 5752 5771 5790 5809 5828 5847 5866